
Advanced Research Journal of Computer Science
ISSN Print: N/A
ISSN Online: 3134-884X
About: The Advanced Research Journal of Computer Science (ARJCS) is a peer-reviewed, open-access journal dedicated to publishing high-quality research and review articles in the field of computer science. ARJCS serves as a global platform for researchers, academicians, and industry professionals to share innovative ideas, cutting-edge developments, and practical applications in computing and information technology.
Advanced Research Journal of Computer Science | Year 2025 | Volume 2 | Issue 2 | Pages 1-4
AI-Driven Control Optimization in Electromagnetic Levitation Train Systems
Rida Afzal 1*View PDF Download XML Download DOI XML DOI: 10.66590/arjcs2025020201
Abstract
Magnetic levitation (Maglev) systems operate based on the principles of electromagnetic attraction and repulsion to achieve contactless suspension and transportation. However, Maglev train dynamics are inherently nonlinear and open-loop unstable, making control design a challenging task. This study focuses on the modeling, analysis, and control of a nonlinear Maglev system using three advanced control strategies: NARMA-L2, Model Reference Control (MRC), and Model Predictive Control (MPC). The performance of these controllers is evaluated through simulation under step input conditions to assess their effectiveness in achieving precise position control and system stability. Comparative results demonstrate that the NARMA-L2 controller outperforms the other approaches in terms of accuracy, response time, and robustness. Furthermore, the proposed control strategy enhances system stability and improves ride comfort and handling characteristics of the Maglev train.
Introduction
Magnetic levitation (Maglev) systems exhibit highly nonlinear dynamics, which can generally be decomposed into mechanical and fast electrical subsystems for analysis and control design. One of the most significant applications of this technology is in magnetically levitated trains, which represent a major advancement in modern railway transportation. Unlike conventional rail systems, Maglev trains operate using non-contact levitation, guidance, and propulsion mechanisms, eliminating the need for wheels, axles, and mechanical transmission components [1].
Due to the absence of direct physical contact between the vehicle and the guideway, friction is significantly reduced, enabling higher operational speeds and improved efficiency. High-speed Maglev trains have demonstrated velocities of up to 581 km/h, highlighting their potential as a next-generation transportation solution. Furthermore, the replacement of mechanical components with wear-free electromagnetic systems reduces maintenance requirements and overcomes many limitations associated with traditional wheel-on-rail technology. As a result, Maglev systems have gained considerable attention from transportation industries worldwide. They are widely regarded as a promising solution for addressing both current and future mobility demands. Ongoing research continues to explore innovative designs and control strategies to further enhance the performance, stability, and efficiency of Maglev systems [2].
Traditional control approaches for MAGLEV systems often rely on linearized models, which may not fully capture the inherent nonlinear dynamics of the system. In contrast, advanced nonlinear control strategies have been developed that eliminate the need for model linearization. These methods significantly enhance the stability region of the system by effectively compensating for or dominating the nonlinear characteristics of MAGLEV dynamics. High-speed Maglev trains operate through the interaction of magnetic fields generated by levitation and propulsion systems integrated within the track infrastructure. Levitation magnets enable the train to remain suspended without physical contact, while propulsion magnets are responsible for generating forward motion. Additionally, guidance mechanisms ensure that the train maintains proper alignment along the guideway. Maglev suspension systems are broadly classified into two main types: Electromagnetic Suspension (EMS) and Electrodynamic Suspension (EDS). These configurations form the basis for different Maglev vehicle designs. Fundamentally, a Maglev system consists of two primary components: the vehicle and the guideway. The three essential functions of Maglev technology—levitation, propulsion, and guidance—are all achieved through controlled magnetic forces. In EMS systems, the electromagnets are typically mounted on the vehicle, whereas in EDS systems, magnetic components are integrated within the track or train, depending on the design [3].
Performance of EMS device is based on attractive magnetic forces, even as EDS device works with repulsive magnetic forces. In EDS machine, the automobile is levitated about 1 to ten cm above the guide way using repulsive forces. In EMS system, the vehicle is levitated approximately 1 to 2 cm above the guide way using attractive forces. In EMS system, the electromagnets on the vehicle engage with and are attracted to levitation rails at the guide way. Electromagnets attached to the train are directed up in the direction of the guide way, which levitates the train above the guide way and maintains the vehicle levitated. Control of allowed air gaps among the guide way and train is done by means of the usage of surprisingly advanced manipulate structures.
Material and Methods
Nonlinear Modelling of EDS Maglev Train
The development of a nonlinear model for an Electrodynamic Suspension (EDS) Maglev train requires the independent formulation of mathematical models for both the electromagnetic and mechanical subsystems. Such a structured approach allows for improved analysis of system dynamics and supports the implementation of advanced nonlinear control techniques (Figure 1).
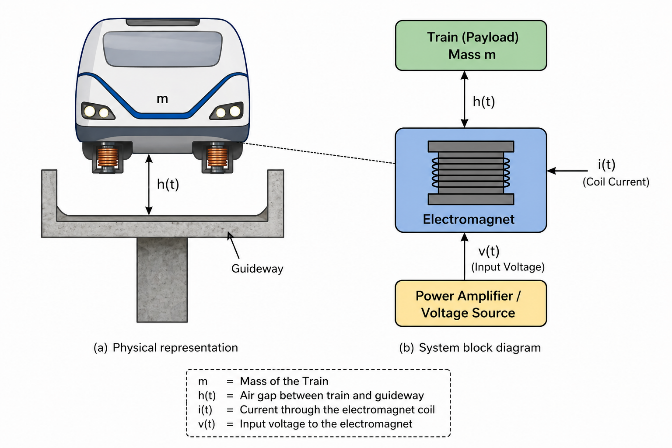
Figure 1: (a) EDS Model, (b) Single Axis Magnetic Suspension System
Figure 1 shows a single axis magnetic levitation system is used, as well as electromagnetic and mechanical equations. The physical paremeters of Ems Maglev Train shown in Table 1.
Electrical Subsystem Modeling
Applying Kirchhoff’s Voltage Law (KVL) to the electromagnet circuit:
V(t)=Ri(t)+L(x)di(t)dt(1)V(t) = Ri(t) + L(x)\frac{di(t)} {dt} \tag{1}V(t)=Ri(t)+L(x)dtdi(t)(1)
where:
- V(t)V(t)V(t) = applied voltage
- i(t)i(t)i(t) = coil current
- RRR = resistance
- L(x)L(x)L(x) = position-dependent inductance
Energy Stored in the Inductor
- W=12L(x)i2(t)(2)W = \frac {1}{2} L(x) i^2(t) \tag{2}W=21L(x)i2(t)(2)
Electromagnetic Force Derivation
The electromagnetic force is obtained from the stored magnetic energy:
fm=−dWdxf_m = -\frac{dW}{dx}fm=−dxdW
Substituting equation (2):
fm=−ddx(12L(x)i2) (3)f_m = -\frac{d}{dx} \left (\frac {1}{2} L(x) i^2 \right) \tag {3} fm=−dxd(21L(x)i2) (3) fm=−12i2dL(x)dx (4)f_m = -\frac {1}{2} i^2 \frac{dL(x)} {dx} \tag {4} fm=−21i2dxdL(x)(4)
Inductance Model
The inductance varies with position and is approximated as:
L(x)=Kx(5)L(x) = \frac{K}{x} \tag{5}L(x)=xK(5)
where:
K=μ0N2A2K = \frac {\mu_0 N^2 A}{2}K=2μ0N2A
- μ0\mu_0μ0 = permeability constant
- NNN = number of coil turns
- AAA = pole area
Table 1: Physical Paremeters of EMS Maglev Train
|
Parameter |
Unit |
Value |
|
M |
kg |
15,500 |
|
R |
|
50 |
|
L |
H |
1 |
|
|
A |
200 |
|
|
mm |
26 |
|
k |
|
0.01 |
|
g |
|
9.8 |
Final Expression of Electromagnetic Force
Substituting (5) into (4):
fm=Ki2(t)2x2(6)f_m = \frac {K i^2(t)} {2x^2} \tag {6} fm=2x2Ki2(t)(6)
Mechanical Dynamics
The total force acting on the train:
f=fm−mgf = f_m - mgf=fm−mg
Using Newton’s second law:
md2xdt2=fm−mg (7)m \frac {d^2 x} {dt^2} = f_m - mg \tag {7}mdt2d2x=fm−mg (7)
where:
- mmm = mass of train
- ggg = gravitational acceleration
State-Space Representation
Define state variables:
x1=x, x2=dxdt, x3=i(8)x_1 = x, \quad x_2 = \frac{dx}{dt}, \quad x_3 = i \tag {8}x1=x, x2=dtdx, x3=i (8)
General nonlinear affine system:
dxdt=f(x)+g(x)u (9) \frac{dx}{dt} = f(x) + g(x)u \tag {9} dtdx=f(x)+g(x)u (9)
Model Reference Controller Design
The model reference controller is designed to contain two neural networks: a neural network controller and a neural network plant model, as shown in Figure 2. The plant model is identified first, and then the controller is trained so that the plant output follows the reference model output.
Predictive Controller Design
There are different types of neural network predictive controller that are based on linear model controllers. The proposed neural network predictive controller uses a neural network model of a nonlinear plant to predict future plant performance. The proposed controller then calculates the control input that will optimize plant performance over a specified future time horizon. The primary goal of the model predictive control is to determine
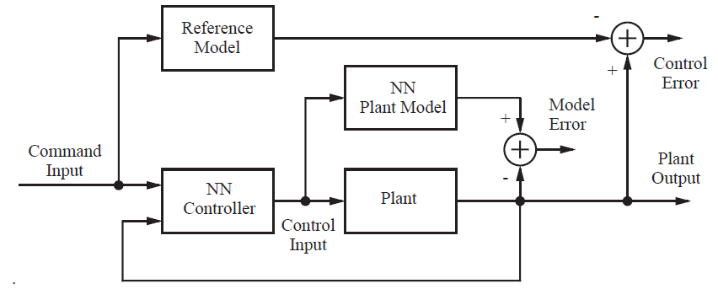
Figure 2: Model Reference Control Architecture
the neural network plant model. Then, the plant model is used by the controller to predict future performance.
Results and Discusion
Maglev Train System Simulation Response
The simulation output for Maglev train system with NARMA-L2, model reference and predictive controllers for a Step input is shown in Figure 4.
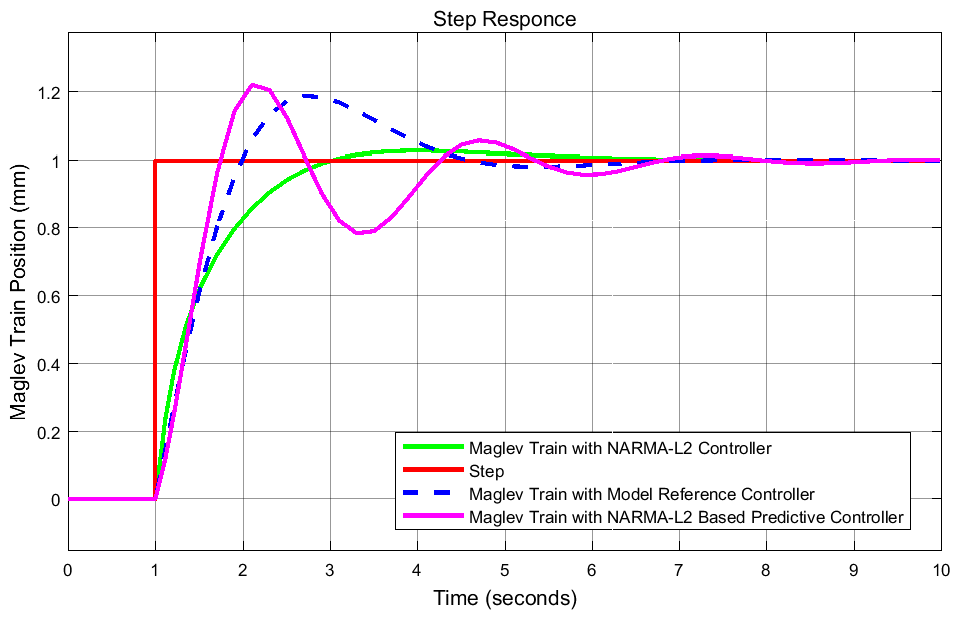
Figure 4: Maglev Train System Step Response
Numerical values of the Performance of NARMA-L2, model reference and predictive Controllers
The numerical values of the proposed controllers are shown in Table.
Table 2: Numerical Values of the Proposed Controllers
|
Controller |
Rise Time (sec) |
Settling Time (sec) |
Percentage Overshoot |
|
NARMA-L2 |
1.241 |
6.7 |
2.577
|
|
M Reference |
0.75 |
7 |
18.452 |
|
Predictive |
0.556 |
9 |
22.840 |
Conclusion
The magnetic levitation (Maglev) system was successfully designed and simulated using MATLAB/Simulink. The system response of the Maglev train was evaluated and analyzed under different control strategies.
Simulation results indicate that the NARMA-L2 controller achieves a shorter settling time compared to both the Model Reference Controller (MRC) and the Model Predictive Controller (MPC). In contrast, the predictive controller demonstrates a faster rise time than the NARMA-L2 and model reference controllers. However, the NARMA-L2 controller exhibits significantly lower percentage overshoot, indicating superior stability and precision in system response.
Overall, the comparative analysis confirms that the NARMA-L2 controller provides better performance in terms of stability, accuracy, and dynamic response, thereby demonstrating its effectiveness for controlling nonlinear Maglev systems [4-6].
References
- Asogwa, Tochukwu et al. “Improving the intelligent control of magnetic levitation ball using artificial neural network.” International Journal of Engineering and Computer Science, vol. 8, no. 6, 2019, pp. 24679–24685.
- Xie, J. et al. “Research on the sensitivity of magnetic levitation (maglev) devices.” Journal of Magnetism and Magnetic Materials, vol. 468, 2018, pp. 100–104.
- Yang, Y. et al. “Study on the optimization of linear induction motor traction system for fast speed maglev train.” Journal of Transportation Systems and Technology, vol. 4, no. 3, 2018, pp. 156–164.
- Costa, F. et al. “Characterization of levitation force for a superconducting magnetic levitation vehicle.” Journal of Transportation Systems and Technology, vol. 4, no. 3, 2018, pp. 124–133.
- Long, Z. et al. “A novel design of electromagnetic levitation system for a high-speed maglev train.” Journal of Transportation Systems and Technology, vol. 4, no. 3, 2018, pp. 212–224.
- Zhang, Zhizhou et al. “Real-time adaptive control of a magnetic levitation system with a large range of load disturbance.” Sensors (Basel), vol. 18, no. 5, 2018.