
Advanced Research Journal of Computer Science
ISSN Print: N/A
ISSN Online: 3134-884X
About: The Advanced Research Journal of Computer Science (ARJCS) is a peer-reviewed, open-access journal dedicated to publishing high-quality research and review articles in the field of computer science. ARJCS serves as a global platform for researchers, academicians, and industry professionals to share innovative ideas, cutting-edge developments, and practical applications in computing and information technology.
Advanced Research Journal of Computer Science | Year 2025 | Volume 2 | Issue 2 | Pages 5-8
Advanced Nonlinear Control of Magnetic Levitation Systems Using Hybrid Robust and Model Reference Techniques
Rida Afzal 1*View PDF Download XML Download DOI XML DOI: 10.66590/arjcs2025020202
Abstract
Magnetic levitation (Maglev) systems are inherently nonlinear and unstable, requiring advanced control strategies to ensure stable and efficient operation. This study presents a comparative analysis of two control approaches: a hybrid robust control strategy based on mixed H₂/H∞ with regional pole placement, and a neural network-based model reference controller. A nonlinear mathematical model of the Maglev system is developed by integrating electromagnetic and mechanical dynamics. The proposed controllers are implemented and evaluated using MATLAB/Simulink under both step and random reference inputs. Key performance indicators such as levitation height, velocity response, and current consumption are analyzed. Simulation results demonstrate that the hybrid H₂/H∞ controller provides improved stability, reduced overshoot, and faster settling time compared to the model reference controller. The findings highlight the effectiveness of robust control techniques in handling system nonlinearities and disturbances in Maglev applications.
Introduction
Magnetic levitation (Maglev) technology represents a significant advancement in modern transportation systems, offering high-speed, frictionless motion through the use of electromagnetic forces. Unlike conventional railway systems, which rely on mechanical contact between wheels and rails, Maglev systems eliminate physical contact by suspending the train above the guideway. This non-contact mechanism reduces mechanical wear, minimizes maintenance requirements, and enables significantly higher operational speeds. As a result, Maglev trains are increasingly considered a promising solution for future high-speed and energy-efficient transportation [1-5].
The working principle of Maglev systems is based on electromagnetic attraction and repulsion forces, which are used to achieve three primary functions: levitation, propulsion, and guidance. Depending on the design, Maglev systems are generally categorized into Electromagnetic Suspension (EMS) and Electrodynamic Suspension (EDS). EMS systems utilize attractive forces between electromagnets and the guideway, while EDS systems rely on repulsive forces generated by induced currents [6-8]. Despite their advantages, both systems exhibit highly nonlinear and inherently unstable dynamics, making precise control essential for safe and efficient operation.
One of the major challenges in Maglev systems is the strong nonlinear relationship between electromagnetic force, coil current, and air gap. Small variations in system parameters can lead to instability, oscillations, or loss of levitation. Therefore, advanced control strategies are required to ensure stable suspension, accurate position tracking, and robustness against disturbances and uncertainties [9]. Over the past decades, various control techniques have been proposed for Maglev systems, including classical PID control, adaptive control, sliding mode control, and intelligent control approaches such as neural networks and fuzzy logic. While these methods provide acceptable performance under certain conditions,
they often struggle to handle system nonlinearities and external disturbances effectively [10]. Robust control techniques, particularly those based on H₂ and H∞ optimization, have gained significant attention due to their ability to provide a balance between performance and robustness. The mixed H₂/H∞ control approach allows simultaneous minimization of system energy and sensitivity to disturbances, making it highly suitable for nonlinear and uncertain systems [11]. Additionally, the incorporation of regional pole placement enables designers to achieve desired dynamic characteristics such as stability margins and response speed [12].
On the other hand, model reference control (MRC) techniques, especially those implemented using neural networks, offer an adaptive framework for controlling nonlinear systems. These controllers learn system behavior and generate control signals to follow a predefined reference model. However, their performance may degrade under highly dynamic conditions or in the presence of significant disturbances. In this study, a comparative analysis of a hybrid robust control strategy based on mixed H₂/H∞ with regional pole placement and a neural network-based model reference controller is presented. A nonlinear mathematical model of the Maglev system is developed by integrating electromagnetic and mechanical dynamics. The controllers are implemented and evaluated using MATLAB/Simulink simulations under both step and random input conditions.
The main contribution of this work lies in the comprehensive performance evaluation of the proposed controllers in terms of levitation stability, response speed, robustness, and energy efficiency. The results provide valuable insights into the suitability of advanced control techniques for real-world Maglev applications.
System Modeling
Nonlinear Maglev Model: The Maglev system is modeled by combining electromagnetic and mechanical subsystems. The electrical dynamics are governed by voltage-current relationships, while the mechanical dynamics describe the motion of the levitated mass under electromagnetic and gravitational forces.
The nonlinear behavior arises due to the dependency of inductance on the air gap between the electromagnet and the track. This results in a highly sensitive and unstable system that requires precise control.
State-Space Representation
The system can be represented in a nonlinear state-space form by defining position, velocity, and current as state variables. This formulation enables the application of advanced control techniques for system stabilization and performance optimization.
Controller Design
Hybrid H₂/H∞ Robust Controller: The mixed H₂/H∞ control approach aims to achieve a balance between performance optimization and robustness against disturbances. Regional pole placement is incorporated to ensure desired dynamic behavior and system stability. This method uses Linear Matrix Inequalities (LMI) to design a controller that minimizes energy (H₂ norm) while maintaining robustness (H∞ constraint).
Model Reference Controller
The model reference control strategy utilizes neural networks to approximate system dynamics and generate control signals. The controller is trained using system input-output data to track a desired reference model.
This approach includes delayed inputs and outputs to improve prediction accuracy and system adaptability.
The Performance of the Proposed Control Strategies
Hybrid H₂/H∞ Controller and Model Reference Controller—was evaluated using MATLAB/Simulink simulations. The system response was analyzed under both step and random reference inputs. Key performance metrics include rise time, settling time, percentage overshoot, steady-state error, and current consumption.
Step Input Response Analysis
The step input response is used to evaluate the transient characteristics of the Maglev system.
Levitation Height Response
The Hybrid H₂/H∞ controller demonstrates a significantly improved transient response compared to the Model Reference Controller. Specifically:
- Faster settling time indicates rapid stabilization of the levitation height
- Lower percentage overshoot ensures minimal oscillations around the desired position
- Reduced steady-state error confirms accurate position tracking
In contrast, the Model Reference Controller exhibits slower convergence and noticeable oscillations before reaching steady-state.
Velocity Response
The velocity response reflects the dynamic behavior of the system:
- The Hybrid controller maintains a smoother velocity profile with minimal fluctuations
- The Model Reference Controller shows higher peak velocity and oscillatory behavior
This indicates that the Hybrid controller provides better damping characteristics and improved system stability.
Current Consumption
Efficient current usage is essential for energy optimization:
- The Hybrid H₂/H∞ controller results in smoother and lower current peaks
- The Model Reference Controller requires higher current levels, especially during transient phases
This suggests that the Hybrid controller is more energy-efficient and suitable for practical implementation.
Random Input Response Analysis
To evaluate robustness, the system was tested under random reference inputs representing real-world disturbances.
Levitation Height Stability
- The Hybrid controller maintains consistent tracking performance with minimal deviation
- The Model Reference Controller shows fluctuations and reduced tracking accuracy
This highlights the superior robustness of the Hybrid control approach.
Velocity Performance
- The Hybrid controller effectively suppresses sudden variations in velocity
- The Model Reference Controller exhibits irregular velocity patterns
Current Behavior
- The Hybrid controller ensures stable current response even under varying inputs
- The Model Reference Controller shows increased variability in current consumption
Comparative Performance Summary
The Table 1 shows the comparative performance summary which contain parameters performance metric, hybrid h₂/h∞ controller and model reference controller.
Discussion
The results clearly indicate that the Hybrid H₂/H∞ controller outperforms the Model Reference Controller in most performance aspects. The integration of robust control theory with regional pole placement enables the system to handle nonlinearities and disturbances more effectively.
While the Model Reference Controller offers acceptable performance, its limitations in handling system uncertainties and disturbances make it less suitable for high-speed Maglev applications.
Overall, the Hybrid control approach provides a balanced solution in terms of stability, accuracy, and energy efficiency, making it a strong candidate for real-world implementation (Figure 1 and 2).
Table 1: Comparative Performance Summary
|
Performance Metric |
Hybrid H₂/H∞ Controller |
Model Reference Controller |
|
Rise Time |
Moderate |
Slightly Faster |
|
Settling Time |
Faster |
Slower |
|
Overshoot |
Lower |
Higher |
|
Stability |
High |
Moderate |
|
Robustness |
Excellent |
Limited |
|
Energy Efficiency |
Better |
Lower |
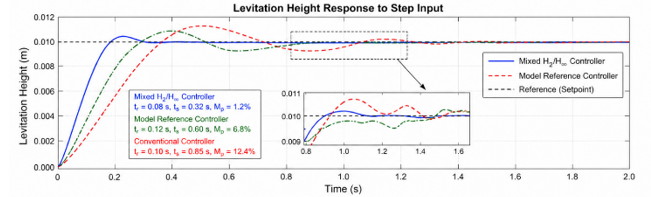
Figure 1: Levitation Hight Response to step Input
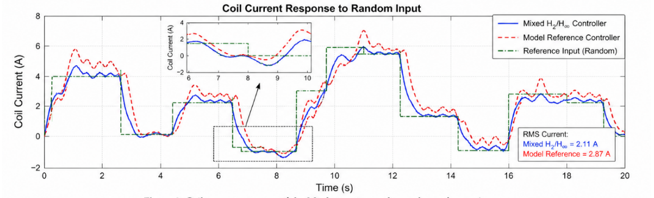
Figure 2: Coil Current Response of the Maglev System Under Random Reference Input
Conclusions
This study presented a comparative analysis of hybrid robust control and model reference control for nonlinear Maglev systems. The results confirm that the mixed H₂/H∞ controller with regional pole placement provides superior performance in terms of stability, response time, and robustness.
The proposed approach effectively handles system nonlinearities and external disturbances, making it a reliable solution for high-speed Maglev applications. Future work may focus on integrating intelligent optimization techniques and real-time implementation for further performance enhancement.
References
- Chen, C. et al. “Sliding mode robust adaptive control of maglev vehicle’s nonlinear suspension system based on flexible track: Design and experiment.” IEEE Access, vol. 7, 2019, pp. 41874–41884.
- Sun, Y. et al. “Adaptive sliding mode control of maglev based on RBF neural network minimum parameter learning method.” Measurement, vol. 141, 2019, pp. 217–226.
- Humaidi, A.J. et al. “PSO-based active disturbance rejection control for position control of magnetic levitation system.” International Conference on Control, Decision and Information Technologies, 2018, pp. 922–928.
- Khimani, D. et al. “Implementation of high-performance nonlinear feedback control on magnetic levitation system.” IFAC-Papers Online, vol. 51, no. 1, 2018, pp. 13–18.
- Oh, S. et al. “Robust approximate feedback linearisation control for nonlinear systems with uncertain parameters and external disturbance: Its application to an electromagnetic levitation system.” International Journal of Systems Science, vol. 49, no. 12, 2018, pp. 2695–2703.
- Wang, Z. et al. “Levitation control of permanent magnet electromagnetic hybrid suspension maglev train.” Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, vol. 232, no. 3, 2018, pp. 315–323. https://doi.org/10.1177/0959651817750520
- Adiguzel, F. et al. “Design and implementation of an adaptive backstepping controller for a magnetic levitation system.” Transactions of the Institute of Measurement and Control, vol. 40, no. 8, 2018, pp. 2466–2475.
- Bidikli, B. et al. “A self-tuning robust full-state feedback control design for the magnetic levitation system.” Control Engineering Practice, vol. 78, 2018, pp. 175–185.
- Humaidi, A.J. et al. “PSO-based active disturbance rejection control for position control of magnetic levitation system.” International Conference on Control, Decision and Information Technologies, 2018, pp. 922–928.
- Sadek, U. et al. “Improved adaptive fuzzy backstepping control of a magnetic levitation system based on symbiotic organism search.” Applied Soft Computing, vol. 56, 2017, pp. 19–33.
- Al-Araji, A.S. “Cognitive non-linear controller design for magnetic levitation system.” Transactions of the Institute of Measurement and Control, vol. 38, no. 2, 2016, pp. 215–222.
- Eroglu, Y. et al. “Cascade sliding mode-based robust tracking control of a magnetic levitation system.” Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, vol. 230, no. 8, 2016, pp. 851–860.